|
V našej dlhoročnej praxi s riadenými pohonmi sa nižšie zmienený problémy vyskytujú najčastejšie. Pokiaľ si osvojíme základné postupy, ľahko predídeme komplikáciám pri inštalácii, prípadne servise.
Typi pred inštaláciou: Vždy používajte tienený vodič od frekvenčného meniča ku elektromotoru. Tienenie na oboch stranách uzemnite. Neprekračujte maximálnu doporučenú dĺžku vodičov definovanú výrobcom. Dbajte na to, aby bol prierez vodičov zodpovedajúci prúdu meniča. Jedná sa o elektrické zariadenie a do prevádzky by ho mala zapájať patrične zaškolená a certifikovaná zodpovedajúcim paragrafom vyhlášky! Menič je ovládaný externými prepínačmi. Štart / stop signál je privedený na svorkovnicu, ale nereaguje na ovládanie
Skontrolujeme či je svorkovnica elektromotora zapojená správne. Prepojenie plieškov vo svorkovnici musí zodpovedať výstupnému napájaniu meniča. V prípade že má frekvenčný menič výstup 3x230V, štandardný elektromotor bude zapojený do trojuholníka. Pokiaľ dáva menič 3 x 400V, zapojenie motora bude do hviezdy. Správne prepojenie svorkovnice býva zobrazené na spodnej strane krytu svorkovnice a vždy ho doporučujeme skontrolovať. Menič vypadáva pri rozbehu, hlási preťaženie
Modesto je miesto, kde si môžete kúpiť Prevodovky a Servopohony
0 Comments
 Elektrina, magnetizmus a pohyb Základná myšlienka elektrického motora je veľmi priamočiara: do neho vložíte silu smerom k jednej strane a náboj (kovová tyč) sa otočí na opačnom konci, čo vám umožní riadiť stroj alebo podobne. Ako to funguje prakticky? Ako presne sa váš veriaci zasadzuje do rozvoja? Aby sme na to našli odpoveď, musíme sa vrátiť v čase len asi 200 rokov.
Predpokladajme, že si zoberiete dĺžku štandardného drôtu, urobíte z neho hlavný kruh a položíte ho medzi hriadele neuveriteľného, nemenného podkovového magnetu. V súčasnosti, keď náhodou priradíte obe časti dohody k batérii, sa vodič rýchlo odrazí. Je úžasné, keď to vidíte len preto, že. Je to takmer rovnaké ako očarovanie! V každom prípade existuje vynikajúce logické objasnenie. V okamihu, keď sa elektrický prúd začne plaziť pozdĺž drôtu, vytvára ho atraktívne pole. V prípade, že drôt umiestnite takmer ako permanentný magnet, toto prechodne atraktívne pole spolupracuje s poľom nemenného magnetu. Uvedomíte si, že dva magnety sa vložili takmer do seba, buď vtiahli alebo odrazili. Podobne, krátka príťažlivosť okolo drôtu vtiahne alebo potlačí trvalú príťažlivosť z magnetu, a to je vec, ktorá robí drôtený poskok. Predpokladajme, že skrútime drôt do štvorcového kruhu v tvare písmena U, takže cez atraktívne pole prechádzajú primerane dva paralelné drôty. Jeden z nás odstraňuje elektrický prúd z nás drôtom a druhý privádza tento prúd späť späť. Pretože súčasné prúdy v drôtoch inverzne smerujú, Flemingovo pravidlo pre ľavú ruku nám ukazuje, že sa oba drôty budú pohybovať inverzne. Ako to bolo, v bode, v ktorom zapneme napájanie, sa jeden z drôtov pohne smerom nahor a druhý sa zostupne. V prípade, že by sa slučka drôtu mohla ďalej pohybovať týmto smerom, trvalo by sa točila - a my by sme boli v tranzite na výrobu elektrického motora. V každom prípade to nemôže nastať pri našom súčasnom usporiadaní: káble sa rýchlo zamotajú. To, že by sa zvlnená šanca mohla otočiť dosť ďaleko, by sa stalo niečo iné. V súčasnosti by sa sily na každej strane slučky otočili. Skôr než sa neustále otáčať podobným spôsobom, Ak si chcete kúpiť elektromotor a Frekvenčný Menič, navštívte náš profesijný webový. presunula by sa späť na cestu, na ktorú prišla celkom nedávno! udržal by usporiadanie dozadu a dopredu na mieste bez toho, aby sa v skutočnosti kdekoľvek nachádzal. Základom návrhu je základný pohonový vzorec: ,
kde P = je výkon v kW M = je moment v Nm n = sú otáčky za minútu 9550 je prepočítavacia konštanta Vzorec definuje vzťah medzi výkonom, momentom a otáčkami. Riadený pohon je zvyčajne tvorený motorom, prevodovkou a frekvenčným meničom. Štandardný pohon sa bez frekvenčného meniča navrhuje na frekvenciu 50 Hz. Dôležitým parametrom pre jeho návrh je výkon motora a výstupné otáčky prevodovky. Pri riadenom pohone je to trochu iné. Prirodzene sa počíta s tým, že pohon nebude mať konštantné otáčky, ale bude pracovať v definovanom rozsahu otáčok. Z pohonového vzorca vyplýva, že ak máme premenlivé otáčky, budeme mať aj premenlivý výkon. Jediná konštantná veličina je moment riadeného pohonu. Preto základným parametrom pre návrh riadeného pohonu je moment, ktorý je zvyčajne konštantný v rozsahu 5 až 50 Hz. Ako zvolíme prevodový pomer a výkon motora pri štandardnom pohone? - zadefinujeme si otáčky, v ktorých bude pohon pracovať - vypočítame výstupný moment, ktorý budeme potrebovať pre našu aplikáciu - podľa výstupného momentu a otáčok si vyberieme z tabuľky v katalógu prevodoviek, prevodovku, ktorá má požadované parametre ( výstupný moment a otáčky ). V príslušnom riadku je definovaný aj výkon motora. Tabuľka 1Príklad: vybrali sme si prevodovku ktorá má nasledovné parametre: výstupný moment: 58 Nm výstupné otáčky: 70 ot./ min výkon motora: 0,55 kW prevodový pomer: 20 prevádzkový faktor: 1,3 Čo je ešte dôležité ? Pri výbere prevodovky je dôležitý prevádzkový faktor - fs. Je to konštanta, pomocou ktorej môžeme vypočítať maximálny moment, ktorý je prevodovka schopná preniesť. Fs v podstate určuje preťažiteľnosť prevodovky. Ak je Fs nižší ako 1, je prevodovka voči motoru poddimenzovaná. Pokračovanie príkladu z tabuľky 1: výstupný moment: 58 Nm prevádzkový faktor: 1,3 maximálny moment, ktorý je prevodovka schopná preniesť vypočítame: Mmax = M * Fs = 58 * 1,3 = 75,4 Nm maximálny moment, ktorý je prevodovka schopná preniesť, teda bude 75, 4 Nm Ako navrhneme riadený pohon? V zásade postupujeme rovnako. Pokiaľ je regulačný rozsah malý a pohon nebude pracovať pri frekvencii nižšej ako 30 Hz, môžeme použiť pohon navrhnutý hore. Ak je vyšší regulačný rozsah a s minimálnou frekvenciou sa dostaneme pod 30 Hz, posunieme maximálnu frekvenciu tak, že pohon dosiahne maximálne otáčky na 70 Hz. Čo sme spravili? Zvýšili sme frekvenciu 1,4 násobne. To znamená, že maximálne otáčky motora nebudú 1400 otáčok, ale budú: nmax = 1,4 * 1400 = 1 960 ot./ min Aby sme sa dostali na pôvodné otáčky, musíme zvýšiť aj prevodový pomer 1,4 krát. in = i * 1,4 = 20 * 1,4 = 28, použijeme najbližší prevodový pomer prevodovky imax = 30 Zvýšením prevodového pomeru sme zvýšili výstupný moment ( pre jednoduchosť zanedbáme zmenu účinnosti prevodovky ) Výstupný moment bude mať hodnotu: M = 58 * 1,4 = 81, 2 Nm teda v rozsahu 5 až 50 Hz bude výstupný moment 81,2 Nm, čo je o 40 % viac ako pri pohone pracujúcom do 50 Hz. Aký bude moment medzi 50 a 70 Hz ? Od 50 Hz bude moment motora klesať vplyvom odbudzovania motora. Výkon bude konštantný. Na 70 Hz bude moment dosahovať približne 70% momentu pri 50 Hz, teda výstupný moment bude: M = 81,2 * 0,7 = 56,84 Nm Ak porovnáme pôvodný moment z návrhu pre 50 Hz ( 58 Nm ) a moment pre 70 Hz (56,8Nm) , zistíme, že moment pri 70 Hz je len o 1,16 Nm menší. V čom spočíva výhoda návrhu riadeného pohonu na frekvenciu 70 Hz? - výstupný moment pri návrhu pohonu na 70 Hz bude v rozsahu 5 až 50 Hz vyšší o 40% , ako pri pohone navrhnutom na 50 Hz. - výstupný moment pri návrhu pohonu na 70 medzi 50 a 70 Hz bude vyšší ako moment 50 Hz pohonu. K vyrovnaniu momentu dôjde až tesne pod 70 Hz - vyšší prevodový pomer zabezpečí vyššie otáčky motora a tým lepšie chladenie motora - vyšší moment zníži zaťaženie motora a tým klesne jeho ohrev a nebude potrebné použiť cudzie chladenie časové reléNová generácia časových relé z našej ponuky Vás určite osloví svojou cenou, ako aj skladovými zásobami* vybraných modelov vo firme Modesto.   kúpiť Elektromotory V tomto článku by som chcel spomenúť niečo z našich aplikačných skúseností s asynchrónnymi motormi riadenými frekvenčným meničom. Nakoľko mnohým nie sú jasné základné princípy riadených pohonov, začnem od úplného začiatku Aký je princíp činnosti asynchrónneho motora s kotvou nakrátko ? Asynchrónny motor sa skladá z dvoch základných častí - statora a rotora. V prípade asynchrónneho motora s kotvou nakrátko je rotor tvorený spravidla hliníkovou klietkou, ktorá je obvykle tvorená vodivými tyčami na koncoch vodivo spojenými. Stator je vo svojom princípe sústava elektromagnetov. Po pripojení statora na napájanie, vytvorí stator rotujúce magnetické pole. Toto pole statora indukuje v tyčiach rotora elektrický prúd vytvárajúci elektromagnetické pole rotora. Magnetické pole rotora je unášané rotujúcim poľom statora a snaží sa ho dobehnúť. Pri priblížení sa rotora otáčkam rotačného poľa statora sa znižuje indukovaný prúd a klesá veľkosť magnetického poľa rotora. Preto asynchrónny motor nikdy nedosiahne otáčky točivého poľa statora a je sústavne za rotačným magnetickým poľom rotora v sklze. Aký je vzťah medi výkonom, otáčkami a momentom pohonu ? Tento vzťah vyjadruje vzorec kde P = je výkon v kW M = je moment v Nm n = sú otáčky za minútu 9550 je prepočítavacia konštanta Tento vzorec môžeme považovať za základný vzorec riadených pohonov. Jasne z neho vidíme, že moment, výkon a otáčky pohonu, sú matematicky viazané. Aký je regulačný rozsah motora riadeného frekvenčným meničom? Dnešné frekvenčné meniče dokážu v pomerne veľkom rozsahu riadiť asynchrónne motory. Všeobecne sa uvádza, že regulačný rozsah asynchrónneho motora riadeného frekvenčným meničom je 1 : 10. Čo znamená preložené do zrozumiteľnej reči, že motor bude pracovať bez straty momentu pri frekvencii 5 až 50 Hz, alebo prepočítané na otáčky bežného štvorpólového asynchrónneho motora v rozsahu od 140 do 1400 ot./ min. V tomto rozsahu bude jeho moment konštantný, teda bude rovnaký pri 5 Hz, 20 Hz aj 50 Hz. Keď sa pozrieme na základný pohonový vzorec, vyplýva z neho, že výkon motora sa mení s jeho otáčkami. Ako príklad si zoberme štandardný motor výkonu 1,5 kW s parametrami: nominálny výkon P = 1,5 kW nominálny moment M = 10,3 Nm nominálne otáčky n = 1 390 ot./ min. 1. Otáčky motora pri 5 Hz budú: Výkon pri 5 Hz bude: 2. Otáčky motora pri 20 Hz budú: Výkon pri 20 Hz bude: 3. Otáčky pri 50 Hz budú: n = 1 390 ot./ min Výkon pri 50 Hz bude: Z uvedeného je jasne vidieť, že pri riadenom pohone je do 50 Hz moment konštantný, ale výkon lineárne rastie. Čo je krútiaci moment motora ? Moment pri riadenom pohone je najdôležitejší parameter. Z fyziky vieme, že moment sa vypočíta podľa vzorca: M = F * r, kde M je moment v Nm F je sila ( napríklad tiažová v N ) r je rameno, na ktorom pôsobí sila v m Aký je moment asynchrónneho motora pri frekvencii nižšej ako 5 Hz ? Moment pri nižších frekvenciách je veľmi závislý od algoritmu riadenia motora vo frekvenčnom meniči. Pri skalárnom riadení ( U/ f ) väčšinou nebýva pod 5 Hz garantovaný. Pri frekvenčných meničoch s vektorovým riadením v otvorenej regulačnej slučke môže motor nominálny moment dosiahnuť už pri frekvencii okolo 1 Hz a regulačný rozsah sa zvýši na 1 : 100. Pri vektorovom riadení v uzavretej slučke ( s použitím inkrementálneho snímača otáčok motora ) sa môže regulačný rozsah blížiť až ku hodnote 1 : 10 000. Čo sa deje s momentom motora nad frekvenciou 50 Hz ? Ako vyplýva z princípu asynchrónneho motora, rotor na základe indukcie vytvára elektromagnetické pole. Pri riadení motora frekvenčným meničom ( najlepšie sa to dá pochopiť z U/f charakteristiky ) existuje závislosť medzi frekvenciou a napätím na výstupe frekvenčného meniča (obr. 1). Vyššej frekvencii zodpovedá vyššie napätie. Zvyšujúce sa napätie kompenzuje vzájomnú interakciu pola rotora a statora. Pri 50 Hz dosiahne menič nominálne napätie na výstupe a ďalšie zvyšovanie napätia už nie je možné. Zvyšovanie frekvencie spôsobuje odbudenie motora a postupné znižovanie momentu motora. Motor už nepracuje s konštantným momentom, ale s konštantným výkonom.  Kúpiť Elektromotor
Ponuka firmy MODESTO zahŕňa a asynchrónne elektromotory. Podobne ako pri ostatných komponentoch z našej ponuky aj v tejto oblasti kladieme veľký dôraz na kvalitu a technickú úroveň. Preto sú našimi dodávateľmi významní európski výrobcovia - nemecká firma Lenze a talianska firma Seipee. Elektromotory z našej ponuky sú izolačnej triedy F a sú konštruované pre prácu s frekvenčným meničom.Elektromotory od talianskeho výrobcu SEIPEE spa. Túto značku úspešne zastupujeme takmer desaťročie na Českom a Slovenskom trhu ako oficiálny distribútor. Za ten čas môžeme potvrdiť kvalitu a spoľahlivosť SEIPEE elektromotorov.Ako u našich vracajúcich sa klientoch, tak aj na vlastných projektoch. Aktuálne držíme skladom desiatky kusov asynchrónnych elektromotorv. a viac ako 80 000 kusov je pripravených v talianskom sklade! K dispozícii sú: asynchrónne elektromotory trojfázové - napájanie 3x230V/400V/690V, možnosť priamo pripojiť frekvenčný menič.so zodpovedajúcim výstupom. V hliníkovej verzii majú odnímateľné nožičky, štandardný priemyselný elektromotor. asynchrónne elektromotory jednofázové - napájanie 1x230V... antikorové motory IP69K - vďaka hladkému antikorovému povrchu sú eieto elektromoty ideálne všade kde sa vyžaduje zvýšená hygiena. Pílové elektromotory elektromotory s brzdou, s enkóderom, nútené chladenie elektromotora a iné rózne možnosti úprav podľa potreby použitia. Brzda elektromotora môže byť jednosmerná, alebo striedavá. Elektromotory ATEX do výbušného prostredia - elektromotor prispôsobený a certifikovaný na prevádzku v Atexovom prostredí Elektromotory sú k dispozícii v triedach účinnosti IE1, IE2, IE3, IE4 s vlastným aj cudzím chladením. Našou snahou je ponúknuť zákazníkovi kompletný sortiment výrobkov. Preto v našej ponuke nájdete aj prevodovky, frekvenčné meniče a riadiace systémy. Využite naše skúsenosti v oblasti riadených pohonov a kontaktujte nás!  Kapacitné snímače
od firmy Carlo Gavazzi už dlhodobo predstavujú európsku špičku v tejto oblasti snímačovej techniky. V poslednom období bol urobený celý rad inovačných zmien, ktorých hlavným cieľom bolo zvýšenie citlivosti, spínacej frekvencie a odolnosti kapacitných snímačov voči statickému náboju. Tým sa dosiahlo podstatné zvýšenie úžitkových vlastností a spoľahlivosti. Kapacitné snímače, ktoré ponúkame, sú priemeru od 12 mm vo vyhotovení s konektorom, alebo káblom. V ponuke sú snímače so zvýšenou citlivosťou, so zvýšenou odolnosťou voči teplote, s napájaním jednosmerným aj striedavým. Skvelá cena je ďalším plusom týchto výrobkov. Radi vám poradíme a pomôžeme pri vašom výbere a návrhu vhodných komponentov pre Vaše stroje a linky . Naším cieľom je Vaša spokojnosť a dlhodobá spolupráca. 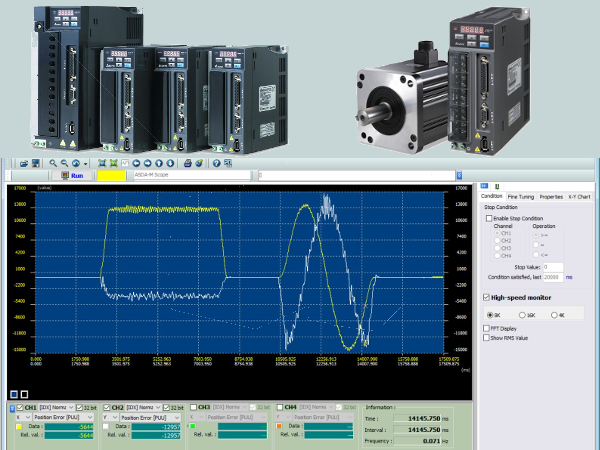 Servopohony série ASDA-B2 Delta Electronics Servopohony ASDA-B2 - jednoduché ale výkonné V našej ponuke servopohonov máme dva typové rady servopohonov od firmy Delta Electronics.Jednoduchšie a cenovo veľmi zaujímavé sú servopohony typového radu ASDA-B2. O málo drahšie, ale s veľkými aplikačnými možnosťami sú servopohony typového radu ASDA-A2. V tomto článku by som chcel popísať základné vlastnosti servopohonov ASDA-B2.Aké výkony servomeničov ASDA-B2 sú k dispozícii? Servomeniče tohto typového radu ASDA-B2 dodávame vo výkonoch 100 W, 200 W,400 W, 750 W, 1 000 W a 1 500 W. Všetky servomeniče tohto typového radu sú jednofázové s napájacím napätím 230 V AC. Aké sú možnosti servomeničov ASDA-B2 ? Jedná sa o základný typ servomeniča od firmy Delta Electronics. Je určený predovšetkým pre jednoduchšie aplikácie. Môže pracovať v polohovom, rýchlostnom, alebo momentovom režime. Rýchlosť a moment môže byť zadávaná prostredníctvom interných parametrov servomeniča, alebo prostredníctvom analógových vstupov. Polohový režim servomeniča ASDA-B2 pracuje na pulznom princípe. Ako teda pracuje servomenič v polohovom pulznom režime ? Vo svojej podstate je to simulácia činnosti krokového motora, ktorý sa vždy otočí o toľko krokov, koľko dostane impulzov ( za krok sa považuje uhol medzi dvomi susediacimi pólmi krokového motora). Pri pulzne riadenom servopohone to teda vyzerá tak, že z riadiaceho systému sú servomeniču vysielané pulzy. Servomenič ich príjme, spracuje a zabezpečí, aby sa servomotor otočil o rovnaký počet impulzov zo spätnej väzby servomotora v rovnakej frekvencii ako ich prijal servomenič. Takže v tomto prípade znamená 1 pulz na vstupe servomeniča otočenie servomotora o jeden impulz na spätnej väzbe servomotora. Takto to pracuje, ak je v servomeniči nastavený prevodový pomer 1 : 1. Na čo slúži nastavenie prevodového pomeru v servomeniči ? Prevodový pomer v servomeniči môžeme meniť. Tým môžeme napríklad dosiahnuť to, že jeden pulz na vstupe servomeniča zabezpečí otočenie rotora servomotora o uhol zodpovedajúci na konci pohonového mechanizmu ( motor + prevodovka + pohybová skrutka) posunu o 0,001 mm. Obr. 1 Priklad prevodu rotačného pohybu servomotora na lineárny pohyb Aké je rozlíšenie spätnej väzby servomotora servopohonu typu ASDA-B2? Servomotory tohto typového radu servopohonov majú rozlíšenie enkódera 17 bitov ( 160 000 impulzov na otáčku ). Takéto veľké rozlíšenie umožňuje servomeniču riadiť servomotor s veľkou presnosťou. Je to vidieť aj na obr. 2, kde je zobrazené momentové zvlnenie servomotora s rozlíšením spätnej väzby 2500 imp./ ot. a nášho servomotora s rozlíšením 17 bitov. Zvlnenie momentu s enkóderom 2500 Imp./ ot. Zvlnenie momentu s enkóderom s rozlíšením 17-bitov Obr. 1 Zvlnenie momentu servomotora Delta Electronics so 17 bitovým enkóderom Aká je dynamika servopohonu ASDA-B2 ? Odozva servomeniča na vokajší podnet je menšia ako 1 ms. Servomenič zabezpečí zrýchlenie motora z -3000 na +3000 otáčok za minútu je nižšie ako 10 ms, čo je vidieť na obr. 2.Obr. 2 Moment a rýchlosť servomotora typového radu ASDA-B2 výkonu 400 W Akú komunikačnú zbernicu majú servomeniče ASDA-B2 ? Servomeniče typového radu ASDA-B2 majú integrované sériové rozhranie RS232 a RS485 komunikujúce protokolom Modbus RTU alebo ASCII, ktoré slúži napríklad na komunikáciu servomeniča s PLC, dotykovou obrazovkou alebo na pripojenie k počítaču. Existuje programová podpora pre nastavovanie a archivovanie parametrov servomeniča ? Áno, existuje. Na programovanie a nastavovanie servomeničov vyvinula firma Delta Electronics program ASDA soft, ktorý je voľne šíriteľný a umožňuje jednoduché nastavenie parametrov, monitorovanie pohonu, manuálne ovládanie pohonu z počítača, spustenie autotuningu s nasledovným uložením nameraných parametrov do servomeniča a taktiež obsahuje osciloskop, kde si je možné skontrolovať kvalitu chodu servopohonu. Čo je to autotuning a na čo slúži ? Pri servopohonoch je veľmi dôležité nastavenie jednotlivých regulátorov a parametrov servomeniča ( regulátor rýchlostnej slučky, regulátor polohového riadenia …. ). V nastavení je potrebné zohľadniť mechanické aj elektrické parametre sústavy. Pre uľahčenie nastavenia majú servomeniče Delta Electronics funkciu AUTOTUNING, ktorá slúži na identifikáciu ( zmeranie parametrov ) elektromechanickej sústavy servopohonu. Funkcia autotuning zabezpečí zmeranie parametrov sústavy a vypočíta doporučené nastavenie jednotlivých parametrov servomeniča tak, aby servopohon pracoval optimálne. Užívateľ si potom len skontroluje na osciloskope, či je skutočne všetko v poriadku a podľa jeho predstáv. V prípade potreby ( čo podľa našich skúseností vo väčšine prípadov nie je potrebné ) len dostaví jednotlivé parametre servomeniča. Napriek vysokým úžitkovým vlastnostiam má tento typový rad servopohonov veľmi zaujímavú cenu. Cena servomeniča a servomotora je porovnateľná s cenou bežného asynchrónneho motora s inkrementálnym snímačom riadeného frekvenčným meničom. Preto doporučujeme uprednostniť namiesto voľby riadeného pohonu s meničom a asynchrónnym motorom so spätnou väzbou synchrónny servopohon typového radu ASDA-B2. Za porovnateľnú cenu získate neporovnateľné úžitkové vlastnosti servopohonu |
AuthorWrite something about yourself. No need to be fancy, just an overview. Archives
November 2019
Categories |
 RSS Feed
RSS Feed
